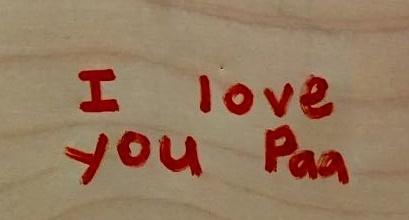
2004 年 SIGGRAPH 上,Microsoft Research UK 有篇经典的图像融合文章《Poisson Image Editing》。先看看其惊人的融合结果(非论文配图,本人实验结果):

这篇文章的实现,无关目前算法领域大火的神经网络,而是基于泊松方程推导得出。
泊松方程是什么?
很多朋友比较熟悉概率论里面的泊松分布。泊松方程,也是同一个数学家泊松发明的。但却和泊松分布没有什么关系,是泊松物理学领域提出的一个偏微分方程。
这里表示的是拉普拉斯算子,和在泊松方程中是已知量)可以是实数或复数值方程,特殊情况当时被称为拉普拉斯方程。当处于欧几里得空间时,拉普拉斯算子通常表示为。
学习图像处理的朋友对于和比较熟悉,分别表示二阶微分(直角坐标系下的散度)、一阶微分(直角坐标系下的梯度)。
微分与卷积
连续空间中的微分计算,就是大学里微积分那一套公式。但是在计算机的世界里,数据都是在离散空间中进行表示,对于图像而言,基本的计算单元就是像素点。让我们从最简单的情形,一维数组的微分说起:
表示位置一阶微分计算(一阶中心导):
表示位置二阶微分计算(二阶中心导):
随着,上面的微分算式的结果会逐渐逼近真实的微分值。对于图像而言,这里最小可分割单元是像素,也就表示像素间的间距,可视为。再看看,二阶微分的公式,是不是可以看成的卷积核在一维数组上进行卷积计算的结果(卷积中心在上)。
至此,不难理解,离散数据(例如图像)上的微分操作完全可以转换为卷积操作。
当数组维度更高,变成二维数组呢?也就是处理图像的拉普拉斯算子:
此时,卷积核尺寸应该是,具体数值为,称为拉普拉斯卷积核。
记住拉普拉斯卷积核,我们后面会用到。
泊松方程求解
这个时候,想想我们学会了什么?泊松方程的形式,以及拉普拉斯卷积核。
再想想,在图像场景下,什么是泊松方程的核心问题?
已知图像点二阶微分值(直角坐标系下即散度)的情况下,求解各个图像点的像素值。
一个简单的例子,假设有一张的图像:,表示各个位置上的图像像素值,共 16 个未知参数需要被求解。
应用拉普拉斯卷积核后,得到 4 个方程式:
4 个方程式求解出 16 个未知参数?这是不可能的。
因此,我们需要另加入至少 12 个更多的方程式,也就是说,需要把剩余 12 个边界点的值确定,即需要确定边界条件。边界一般符合 2 种常见的边界条件:
- Neumann 边界,译为纽曼边界或黎曼边界,给出函数在边界处的二阶导数值;
- Dirichlet 边界,狄利克雷边界,给出边界处函数在边界处的实际值。
但给定边界条件之后,就可以有 16 个方程式组成的方程组了,矩阵化表示此方程组之后,得到形式为。
看到,大家就应该放松了,不就是解方程嘛,用雅可比迭代法或者高斯赛德尔迭代法来求解就 OK 了。
Poisson Image Editing
背景知识储备好了后,让我们把目光拉回到论文《Poisson Image Editing》上。
在图像融合任务中,前景放置在背景上时,需要保证两点:
- 前景本身主要内容相比于背景而言,尽量平滑;
- 边界处无缝,即前景、背景在边界点位置上的像素值,需要保持边界一致。
重点关注两个词:内容平滑、边界一致。平滑是什么?可以理解成图像前景、背景梯度相同。边界一致是指什么?可以理解成在边界上像素值相同。再用一张图来说明:
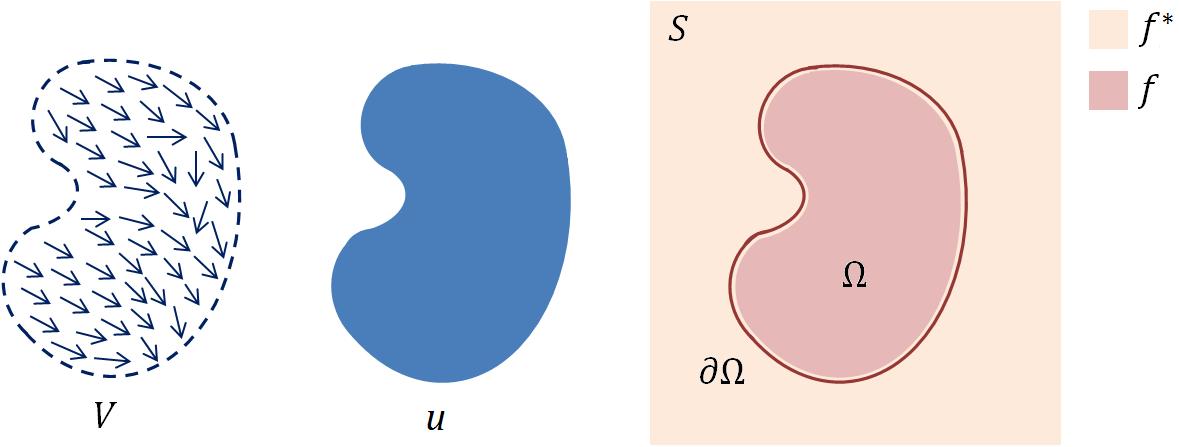
蓝色图片表示前景图片,需要被融合到肉色的背景图片上
上图中表示需要被合成的前景图片,是的梯度场。是背景图片,是合并后目标图像中被前景所覆盖的区域,则是的边界。设合并后图像在内的像素表示函数是,在外的像素值表示函数是。
此时,平滑可表示为:;保持边界一致可表示为:。
这里如果接触过泛函的朋友会比较开心,没接触过的朋友可以先看看欧拉-拉格朗日方程。
令 ,
代入欧拉-拉格朗日方程后则有:
注意:是的函数,不是对的,因此
怎么样,看起来是不是一个泊松方程呢?当然,还差两步:
- 因为需要平滑,取值需要同时参考前景图片和背景图片,可以直接等于前景像素的散度,也可以在前景和背景在同一点像素的散度进行某种组合得到(论文中在 Selection cloning 和 Selection editing 章节有讨论各自合适的场景,但个人以为这里采取学习的方法应该更鲁棒,而不是用固定的策略来区分)。anyway,是可以计算的已知量;
- 因为需要保持边界一致,边界条件上像素值等于背景图片即可。当然也可以做一些策略,但同样也可以计算得到的已知量。
现在很轻松了,边界条件已知、散度已知,在离散空间中求解泊松方程中的,参考上一节的求解过程即可。
代码实现
函数代码已经收录在了 OpenCV 的官方函数 seamlessClone 里:github source code
使用的时候,需要三张图片:前景图、背景图、mask图(指明前景图中需要融合的区域,最简单的就是直接等于前景图大小的 mask,待融合区域是白色,其余位置黑色)。
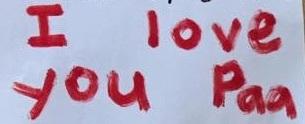
下面我们使用 OpenCV 的 Python 接口来动手试试,用到以下两张图以及一段代码:
-
foreground.jpg
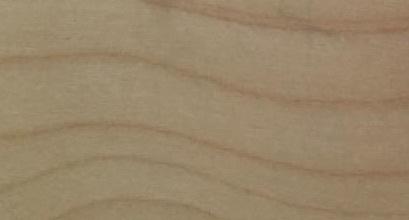
-
background.jpg
import cv2
import numpy as np
# Read images : src image will be cloned into dst
dst = cv2.imread("background.jpg")
obj= cv2.imread("foreground.jpg")
# Create an all white mask
mask = 255 * np.ones(obj.shape, obj.dtype)
# The location of the center of the src in the dst
width, height, channels = dst.shape
center = (height/2, width/2)
# Seamlessly clone src into dst and put the results in output
normal_clone = cv2.seamlessClone(obj, dst, mask, center, cv2.NORMAL_CLONE)
mixed_clone = cv2.seamlessClone(obj, dst, mask, center, cv2.MIXED_CLONE)
# Write results
cv2.imwrite("images/opencv-normal-clone-example.jpg", normal_clone)
cv2.imwrite("images/opencv-mixed-clone-example.jpg", mixed_clone)
最终效果如下: